Mobot 2002
Our entry made it to the ninth gate in the competition, which
is where the decision gates are. We didn't code in decision
gate navigation because we used 7 ir sensors. These sensors
often gave false positives and gave too many errors to accurate
navigate the decision gates. Because of our stellar performance,
we received 2nd place, losing only to some of my friends,
the first undergraduate team to ever complete the course (Congrats
Anthony and Alok).
Her is our entry for the mobot 2002 race by Jack Lin and
Peter Zhang:

Here are some basic specs:
- RC car base: Tamiya Super Hornet $80
- Sensing: 7 * IR sensors from Digikey
- Computing: Handyboard
- Code: Interactive C
This page is intended to advise those of you who have never
made a mobot so you can learn form our mistakes.
Computing:
A handyboard does a lot of functions for you but is very
slow. Its list of goodies includes pwm generators for your
servos, motor drivers, and an easy to track lcd display. However,
if you really want to do some heavy processing, the motorola
processor it uses is far to slow. And ic is really annoying
to program in.
Car base:
Don't use a tamiya super hornet. Buy yourself a cheap rc car
from radio shack and modify it yourself. The advantage of
having the tamiya was its ackerman steering, which was already
built and hooked up to a servo. That made turning the mobot
easy for us. However, you don't have to find a car with a
servo and steering already done, you can easily just use a
differential drive robot with a front caster instead. I do
recommend ackerman steering though because then you can drive
your back wheels at a constant speed to move the mobot and
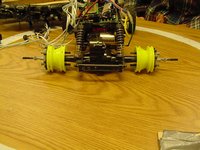
concentrate your processing power on turning. Another problem
with using real rc car bases is that rc cars were meant to
be fast. Notice the hacked lego gearing down system we implemented
onto our mobot. We geared it down 15:1 to get it down to a
speed where it could actually follow the line. Rc cars are
designed to go 30mph! Its hard to get them to slow down.
Sensing:
We tested numerous ir sensors. For the line, they are all
pretty much terrible, although some are better than others.
A problem that occurs is that ir sensors give higher readings
when there is more light at times, so if the mobot sensors
are slightly higher off the ground, the sensors will be skewed.
I recommend coughing up the money for anthony's cmucam and
doing computer vision. This makes mobot a lot harder, however.
|